%4010x.png)

Goal:
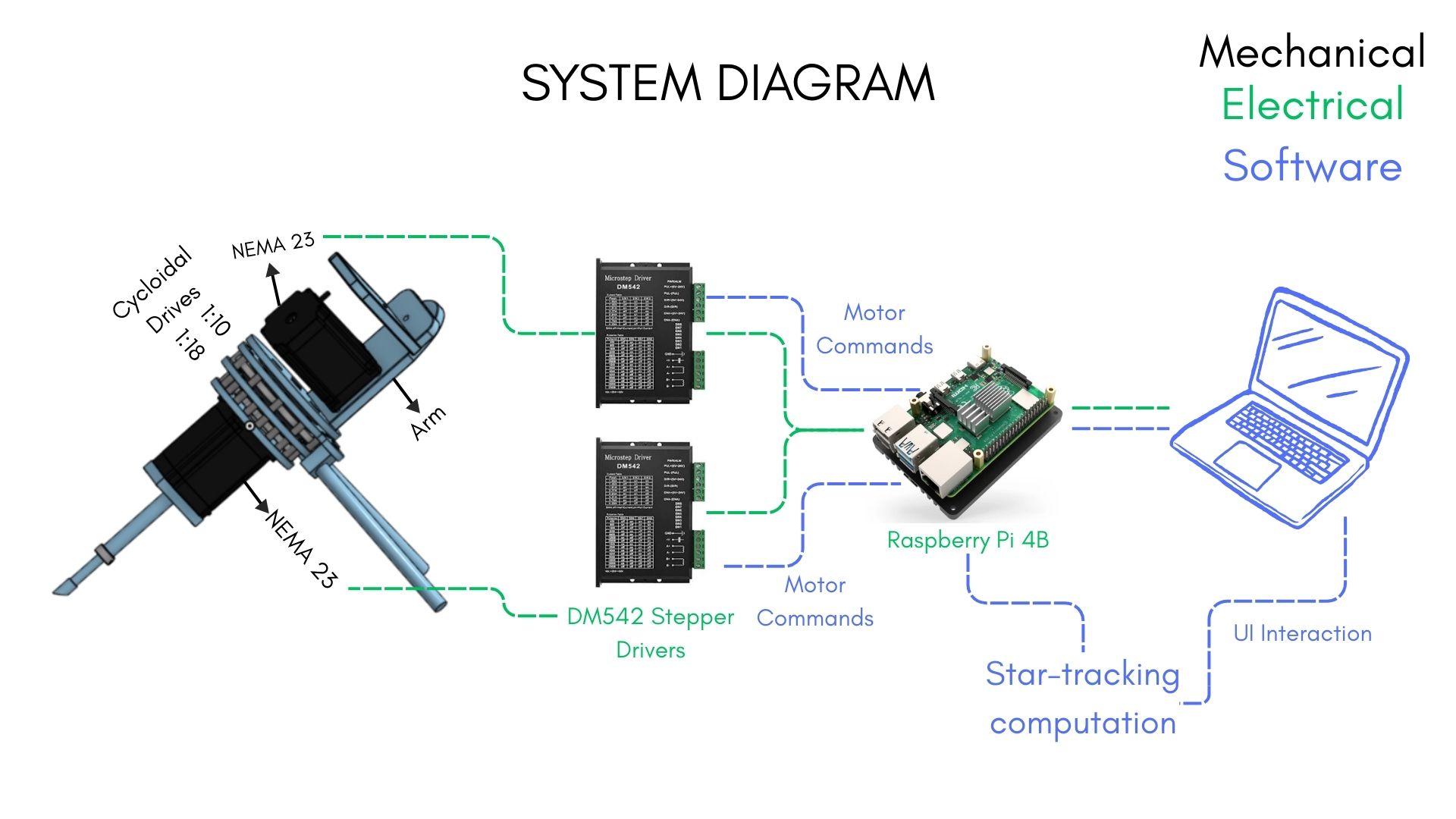
ATLAS is a motorized star-tracking mount designed to enable long-exposure astrophotography by compensating for the Earth’s rotation through a compact, low-cost mechanical system. Within this larger system, my goal was to design and manufacture the camera arm and mount that interface directly with the cycloidal drive, providing a stiff, reliable connection capable of supporting real tracking loads while remaining simple to manufacture and assemble. The design needed to minimize torsional deflection, reduce friction during motion, and rely primarily on materials available in the shop to keep costs low.
Challenges:
One of the primary challenges was managing torsional stiffness under load. Early iterations used a 3D-printed shaft to connect the vertical arm to the camera mount, but testing revealed noticeable twisting due to the combined torque from the camera weight and the gear reduction. This deformation negatively affected tracking accuracy and made the system feel unstable during motion.
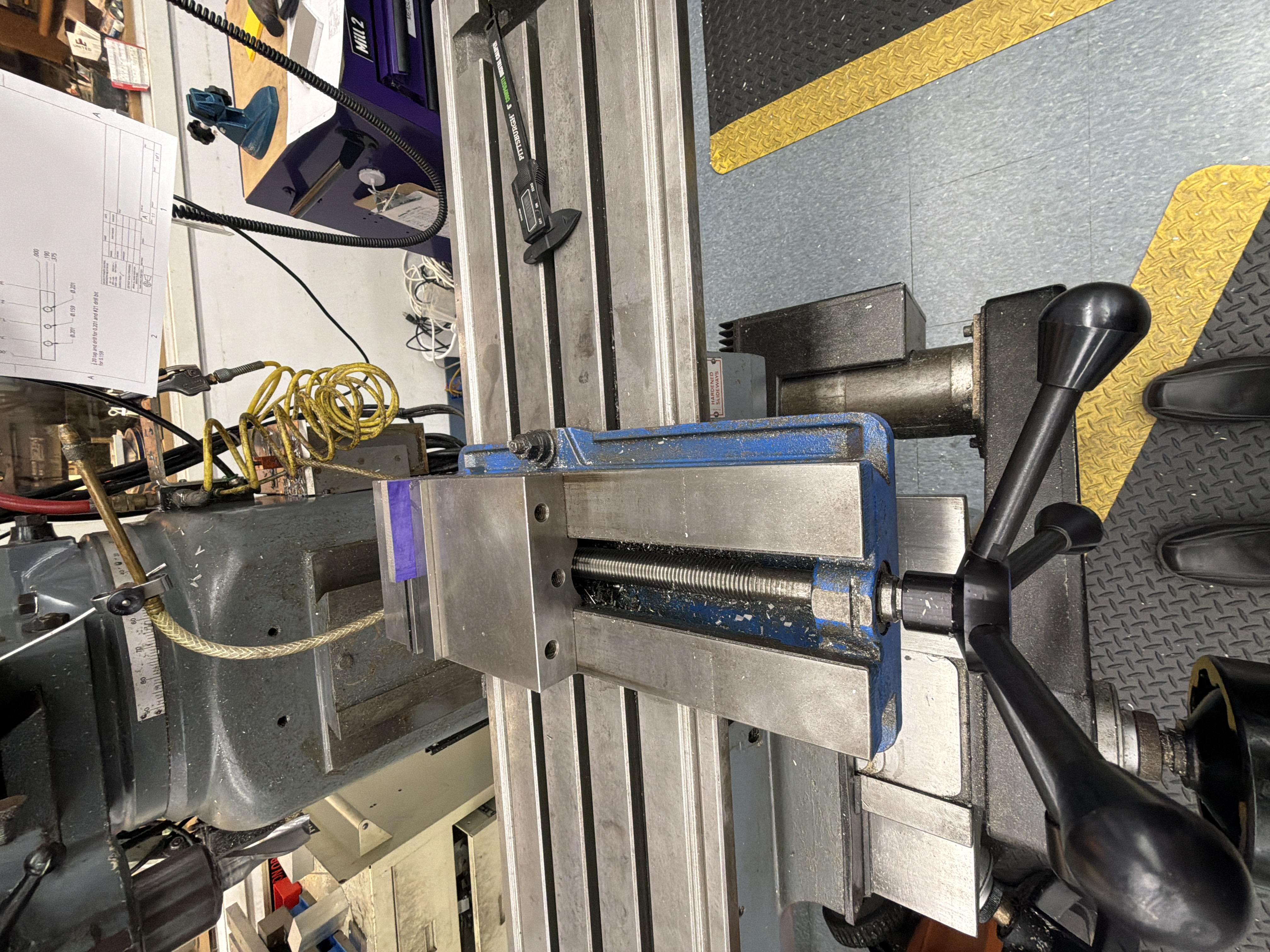
Another challenge was balancing structural rigidity with manufacturability and material availability. The arm needed to house the motor and gear reduction, interface cleanly with the base plate, and allow smooth rotation at the camera mount, all while being machined quickly and consistently from available stock.
Outcome:
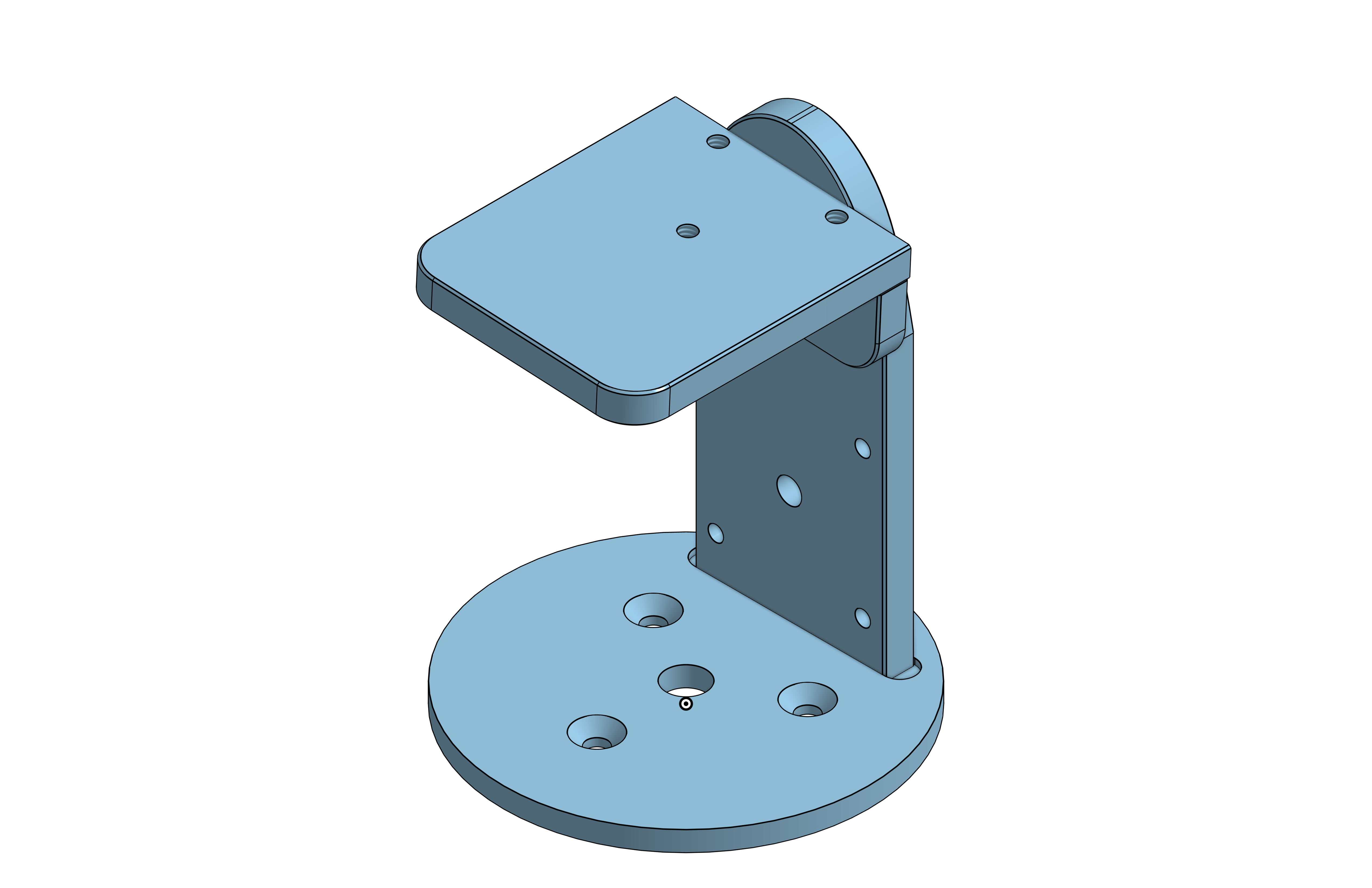
The final design uses a steel shaft and an off-the-shelf bearing to connect the vertical arm to the camera mount, significantly increasing stiffness and eliminating visible torsional deformation. The bearing reduced friction and wear while allowing smooth rotation during tracking.
The arm plate and camera mount plate were machined from 3/8-inch 6061 aluminum to prioritize rigidity and stability, while the base plate was machined from 1/4-inch 6061 aluminum to match other structural components in the system. Both material choices were driven by available scrap stock, allowing the subsystem to be manufactured without additional material cost while maintaining reliable performance.
Through iterative testing and material changes, the camera arm and mount evolved into a robust, repeatable subsystem that performed reliably during live tracking tests and supported accurate long-exposure imaging.
If you’d like to see the full ATLAS system, including modeling, control logic, and field testing, you can explore the complete project here →
ATLAS WEBSITE