%4010x.png)

Goal:
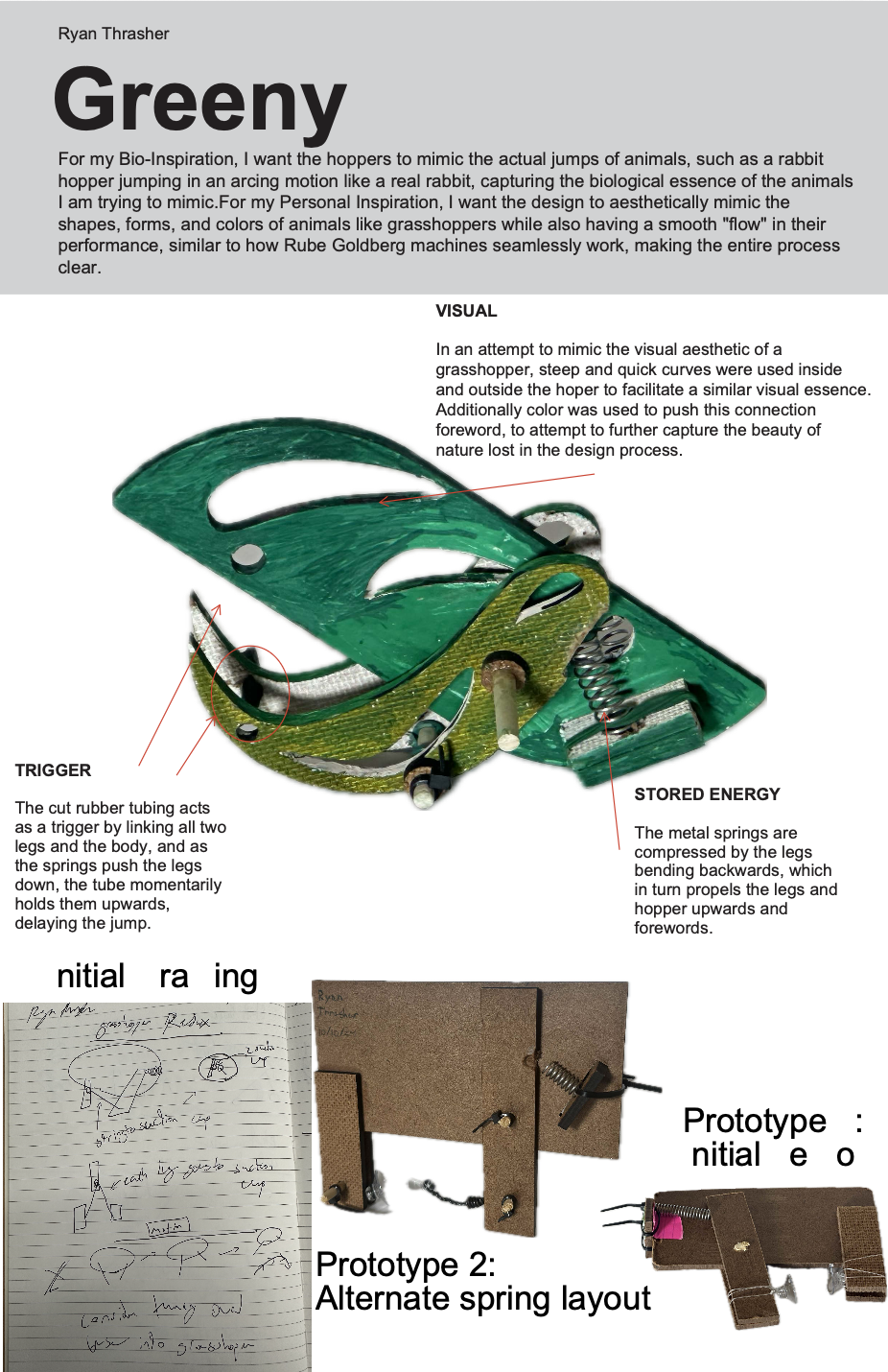
The Hopper project was a fast, constraint-heavy challenge: design a fully mechanical device that sits still, waits three seconds, and then jumps. No electronics, no external input, just stored energy, timing, and release. On top of that, the design had to be inspired by insect locomotion. My goal was to create a hopper that didn’t just jump, but felt biological. I drew inspiration from grasshoppers and rabbits, focusing on arcing motion, spring-loaded legs, and a clear sequence of energy storage, delay, and release. The challenge wasn’t just making it jump, but making the mechanism understandable through motion alone.


Challenges:
Everything about this project was iteration-driven. Early prototypes tested whether the basic leg geometry and pivot motion were even feasible. Springs slipped, bent, or failed entirely. Triggers worked in isolation but broke under full load. Each failure revealed a new constraint that only showed up once the system was physically built.
As the design evolved, fixes introduced new problems. Angling the spring backboard solved alignment issues but exposed weight and force limitations. Changing trigger materials improved timing but reduced jump height. With limited time, every prototype became a focused experiment rather than a polished solution. The only way forward was building, breaking, and rebuilding quickly.
Outcome:
The final hopper successfully demonstrated delayed release and a mechanical jump, achieving a partial hop with a functioning trigger system. While the jump height fell short of the theoretical maximum, the prototype validated the core mechanism and highlighted clear paths for improvement through weight reduction and spring optimization. More importantly, the project reinforced how mechanical systems reveal truth through motion. Calculations mattered, but real insight came from watching the hopper fail, adjust, and almost succeed. The Hopper project became a lesson in rapid iteration, embodied design, and letting physical behavior guide engineering decisions.